简 介
. 无人潜航器(Unmanned underwater vehicles,UUV)为完成水下目标提供了一种周全的手段,这对灰色地带的行动至关重要。然而,无人潜航器面临着重大的运行挑战,例如电池寿命有限、有效载荷能力受限以及存在敌对威胁。为解决这些问题,本文作者建议开发一种整合了线性规划和在线优化的调度工具。该工具旨在通过计算敌方的最新位置来规避机动中的敌方,同时还能根据使用者的具体要求优先安排维护任务,确定最佳路径。本论文旨在改善面临敌方威胁时的后勤路径,提高灰色地带环境中的军事效率。
. 本书原文发布于2024年3月,译文发布于2024年6月13日。
. 译文全文共计17千字。
目 录
摘要
缩略语
执行摘要
第1章 引言
1.1 研究动机
1.2 模型调整
1.3 总结
第2章 背景
2.1 行动示例
2.1.1 东南亚海域的地缘政治动态
2.1.2 无人潜航器在现代军事行动中的应用与影响
2.1.3 挑战
2.2 问题陈述
2.3 优化方法
2.3.1 旅行商问题
2.3.2 有时间窗车辆路径选择问题
2.3.3 在线最优化
2.4 先前研究
2.4.1 全局路径优化
2.4.2 不确定性环境下的在线最优化
2.5 我们的方法
第3章 方法与公式
3.1 场景设计与假设
3.1.1 行动区域
3.1.2 后勤保障船
3.1.3 无人潜航器
3.1.4 敌对船只
3.2 路径模型方法
3.2.1 完整公式
3.3 在线流程
3.4 概念验证
3.4.1 简单问题
第4章 结果与分析
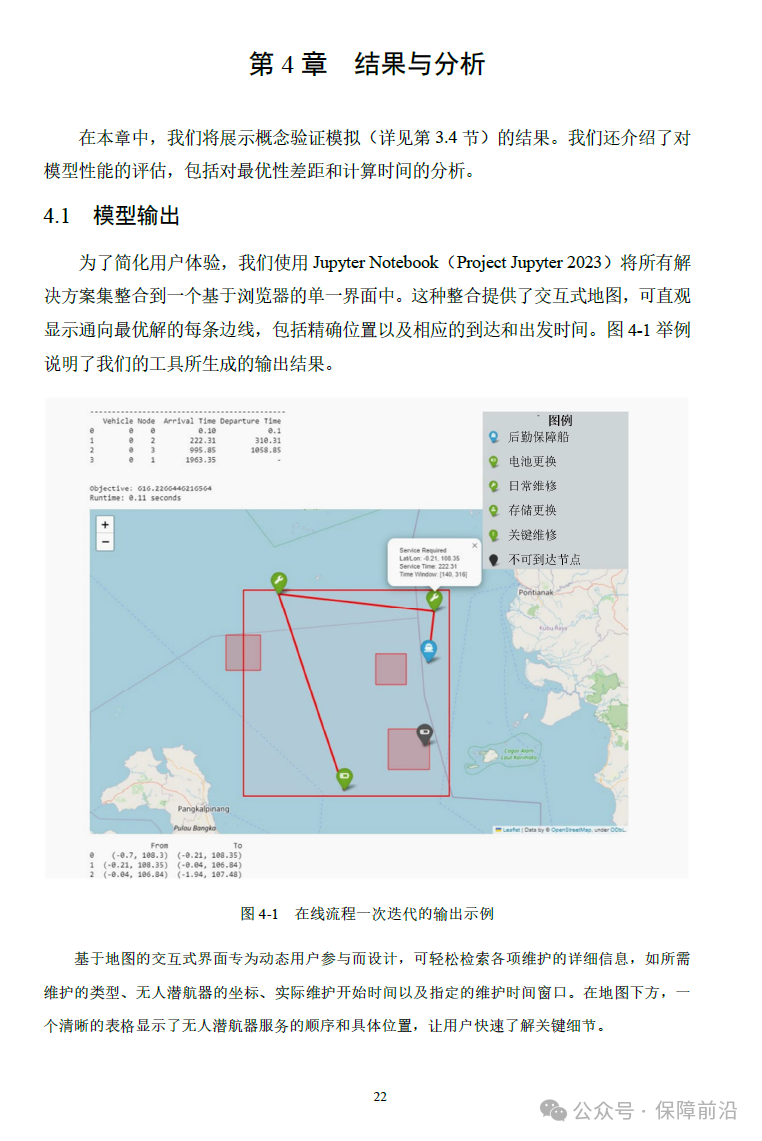
4.1 模型输出
4.2 模拟设置
4.2.1 在线更新
4.2.2 求解器参数
4.3 模拟结果
4.4 模型性能
4.4.1 最优性差距分析
4.4.2 计算的可操作性
4.5 总结
第5章 结论与未来研究
5.1 结论
5.2 未来研究
5.2.1 模型改进与设计
5.2.2 在线更新数据
5.2.3 参数改进
5.2.4 替代策略
部分内容预览

定价:278元

联系我们
购置资料 杨老师:13165589228(微信同)
检索/翻译 梁老师:13011583019(微信同)
定制报告 蔡老师:13068796075(微信同)
北京分公司联系人 刘老师:18610862096(微信同)