简 介
. 本文由美国海军研究生院发布于2023年12月。美国对无人船和小型战斗艇蜂群的需求日益增加,美国海军正在探索使用无人船蜂群执行情报、监视与侦察、水文数据收集以及水面舰艇部队防护任务。通过模拟测试,本文从软件的复杂性、保持特定编队队形的能力和整体鲁棒性三个方面,分析了不同编队控制算法的优缺点,同时评估了算法指挥异构蜂群的能力。
. 本书原文发布于2023年12月,译文发布于2024年4月9日。
. 译文全文共计16千字。
目 录
摘 要
缩略词
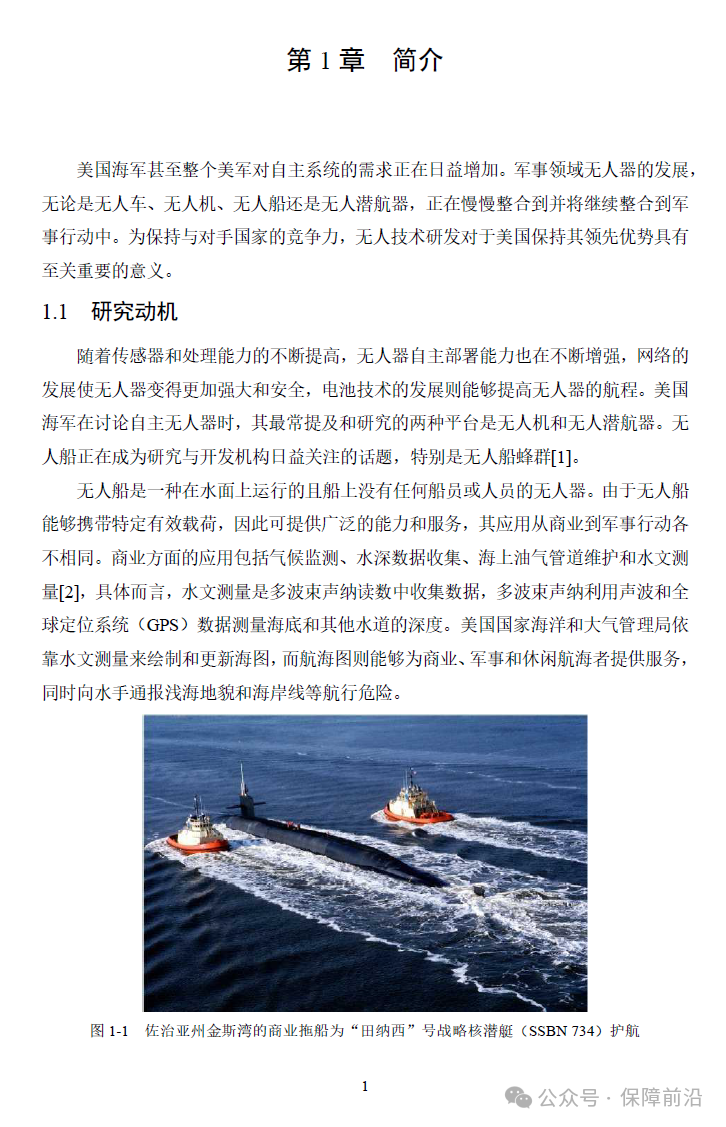
第1章 简介
1.1 研究动机
1.2 文献综述
1.3 问题说明
1.4 贡献
第2章 研究背景
2.1 算法
2.1.1 虚拟结构和人工势能
2.1.2 刚性编队控制
2.2 无人船动力学
2.2.1 “翠鸟”M200无人船
2.2.2 “夹层”艇
第3章 模拟框架
3.1 机器人操作系统基础设施
3.2 测试指标
第4章 结果与分析
4.1 运行虚拟结构和人工势能算法的三艘“夹层”艇
4.2 使用刚性编队控制的三艘“翠鸟”无人船
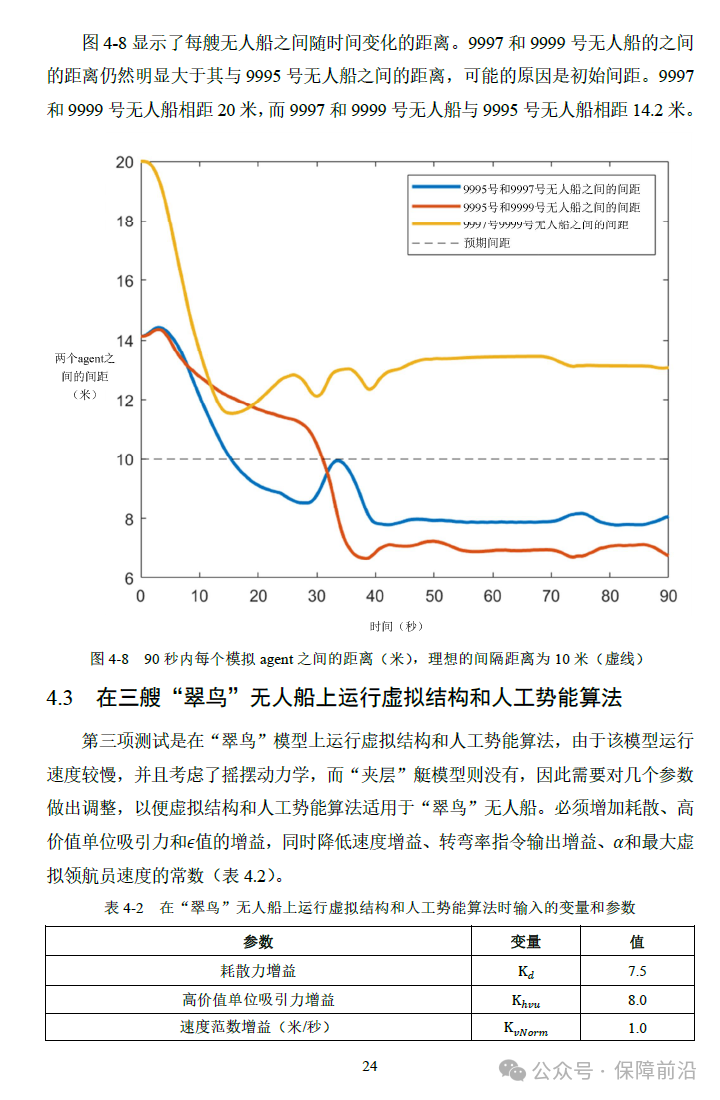
4.3 在三艘“翠鸟”无人船上运行虚拟结构和人工势能算法
4.4 运行刚性编队控制算法的三艘“夹层”艇
4.5 运行虚拟结构和人工势能算法的混合蜂群
4.6 运行刚性编队控制算法的混合蜂群
4.7 指标比较
第5章 结论
5.1 未来工作
部分内容预览
定价:280元

联系我们
购置资料 杨老师:13165589228(微信同)
检索/翻译 梁老师:13011583019(微信同)
定制报告 蔡老师:13068796075(微信同)
北京分公司联系人 刘老师:18610862096(微信同)
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。